
Intentionserkennung im Straßenverkehr derZukunft
Was hat er vor? Diese Frage hat sich wohl schon jeder Autofahrer einmal gestellt, während
Fußgänger oder Radfahrer den Fahrweg kreuzten. Um die Sicherheit von solchen
sogenannten ungeschützten Verkehrsteilnehmern im Straßenverkehr zu erhöhen und in Zukunft das autonome Fahren im innerstädtischen Bereich zu ermöglichen, erforscht das Labor für Kooperative
Automatisierte Verkehrssysteme der Hochschule Aschaffenburg
unter Leitung von Prof. Dr. Konrad Doll die automatisierte Intentionserkennung von ungeschützten Verkehrsteilnehmern.
Die Verkehrssysteme der Zukunft werden sich in vielerlei Hinsicht von der heutigen Situation unterscheiden. In der Stadt werden autonome Fahrzeuge ihre Passagiere unkompliziert, mit
besserem
Verkehrsfluss und ohne Parkplatzsuche von A nach B bringen. Nach wie vor werden sich jedoch Fahrzeuge und ungeschützte Verkehrsteilnehmer die Verkehrswege teilen. Um die Sicherheit von Fußgängern
und Radfahrern zu gewährleisten, müssen die autonomen Fahrzeuge die Intentionen der
Menschen verstehen lernen. So können die Fahrzeuge Rücksicht nehmen und Menschen sich ganz
selbstverständlich im Straßenverkehr mit autonomen Systemen bewegen. Dabei nimmt der Mensch
nicht nur eine passive Rolle ein: Per Handgeste ein selbstfahrendes Taxi herbeiwinken oder autonome
Fahrzeuge vor Gefahren warnen, sind Beispiele für eine aktive Rolle der Menschen auch im zukünftigen
Straßenverkehr.
Zu diesem Zweck beschäftigt sich das Labor für Kooperative Automatisierte Verkehrssysteme mit der
Intentionserkennung von ungeschützten Verkehrsteilnehmern. Dazu gehört es zum einen die Absicht
der Personen frühzeitig zu erkennen, z. B.: „Möchte der Fußgänger die Straße überqueren?“ oder „Wird
der Radfahrer links abbiegen?“, zum anderen soll vorhergesagt werden, wo sich die Person in den
nächsten Sekunden aufhalten wird. Diese Informationen ermöglichen es dem Fahrzeug der Zukunft,
sicher seinen Weg durch den Verkehr zu finden.
Verhalten von Passanten wird an einer Versuchskreuzung erforscht
Für die Intentionserkennung kommen verschiedene Methoden der künstlichen Intelligenz zum Einsatz.
Ähnlich wie es menschliche Fahrer tun, wird dazu die Bewegung der Personen im Verkehr analysiert,
um eine Vorhersage über ihr zukünftiges Verhalten zu treffen. Durch die rasante Entwicklung von Hard
warekomponenten und einer gestiegenen Anzahl verfügbarer Daten wurden in den letzten Jahren
große Fortschritte in der Detektion von Objekten auf Kamerabildern erzielt. So ist es z. B. möglich, die
Pose bzw. die Körperhaltung eines Fußgängers sehr genau zu bestimmen. Diese Informationen liefern
wichtige Anhaltspunkte für das zukünftige Verhalten.
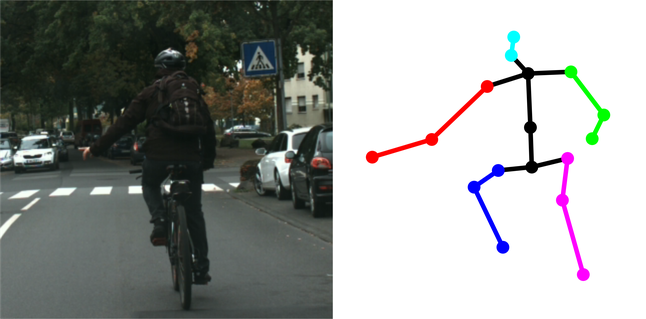
Aus einem Versuchsfahrzeug aufgenommenes Bild eines Radfahrers (links) und die daraus extrahierte dreidimensionale Körperpose (rechts).
Um das Verhalten von ungeschützten Verkehrsteilnehmern vorherzusagen, werden Sensoren wie
Kameras, RADAR oder Laserscanner benötigt. Das Labor für Kooperative Automatisierte Verkehrssysteme verfügt über eine mit Sensorik ausgestattete Versuchskreuzung, die sich direkt an der
Hochschule Aschaffenburg an einer viel befahrenen Kreuzung befindet. Zur Sensorik gehören Kameras und Laserscanner, die verschiedene Bereiche der Kreuzung abdecken. Neben der Versuchskreuzung
wurde ein Versuchsfahrzeug mit Sensorik ausgestattet. Zur Sensorik gehören verschiedene Kameras, mehrere Laserscanner und ein RADAR. Zusätzlich sind Versuchsfahrzeug und Versuchskreuzung zum
Datenaustausch mit Kommunikationsgeräten ausgestattet. Auf diese Weise können wichtige Erkenntnisse über das Verhalten von Personen im realen Straßenverkehr gewonnen werden.
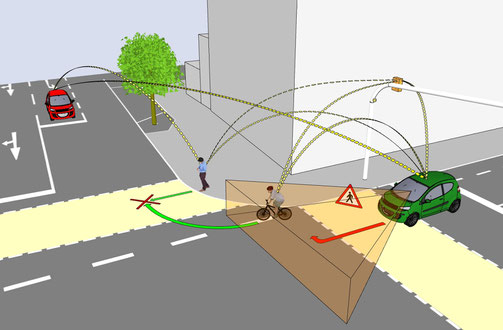
Schematische Darstellung einer potenziellen Gefahrensituation.
Durch die kooperative Intentionserkennung kann das rechtsabbiegende Fahrzeug frühzeitig gewarnt werden.
Zusammenspiel von Daten verschiedener Quellen
Nachdem die Intention der ungeschützten Verkehrsteilnehmer erkannt wurde, können die Informationen
zwischen verschiedenen Fahrzeugen oder mit Sensorik ausgestatteter Infrastruktur ausgetauscht
werden, um ein umfassendes Modell der nahen Umgebung zu schaffen. Auch ungeschützte Verkehrsteilnehmer können dieses Modell ergänzen, indem die Sensorik von Smart Phones oder Smart
Watches ausgewertet und an umliegende Verkehrsteilnehmer übertragen wird. Durch die Kooperation
der Verkehrsteilnehmer ergänzen sich die Sensorsysteme der einzelnen Teilnehmer. So können
Schwächen einzelner Sensoren (z. B. Kamera sieht schlecht bei Regen) ausgeglichen oder Verdeckungssituationen aufgelöst werden.
Um die Forschung auf die Anforderungen der Industrie abzustimmen und die gewonnenen Erkenntnisse
in die Praxis umzusetzen, sind für das Forscherteam Kooperationen mit Partnern aus der Industrie eine wichtige Hilfe. Diese Kooperationen werden auch in Zukunft eine wesentliche Säule der
Forschung darstellen.
Ansprechpartner
Prof. Dr.-Ing. Konrad Doll
Hochschule Aschaffenburg
Würzburger Str. 45
63743 Aschaffenburg
06021 4206-720
konrad.doll@h-ab.de
www.h-ab.de/ueber-die-hochschule/organisation/labor/kooperative-automatisierte-verkehrssysteme/
Teilen Sie gerne mit Ihrem Netzwerk diese Information: